Инженеры из Института робототехники и искусственного интеллекта (RAI) разработали инновационного двухколесного велоробота Ultra Mobility Vehicle (UMV), который способен выполнять сложные маневры, балансировать, перепрыгивать препятствия и даже двигаться на одном колесе. Создание этой роботизированной платформы стало результатом вдохновения трюками профессиональных велосипедистов-триалистов и горных велосипедистов, которые ежедневно преодолевают сложные маршруты по различным типам местности.
Об этом сообщает ProIT
Уникальные технические решения и принципы работы UMV
Велоробот UMV демонстрирует динамичную маневренность, которая не уступает навыкам опытных велосипедистов. По словам соавторов проекта Бена Боксера и Сурьи Сингха, главной задачей было найти оптимальный баланс между скоростью, эффективностью и способностью преодолевать сложные участки местности. Робот получил велосипедную раму, а его конструкция позволяет изменять положение массы, имитируя движения живого велосипедиста.
“Колеса обеспечивают эффективность, а ноги помогают преодолевать лестницы, бордюры и неровности местности. В итоге приходится выбирать между тем, насколько сложным, дорогим и энергозатратным должен быть робот, и тем, насколько он способен преодолевать неизвестные препятствия во время движения. Мы постоянно возвращались к тому факту, что велосипедисты-триалисты и горные велосипедисты ежедневно преодолевают этот разрыв”, — отмечают разработчики.
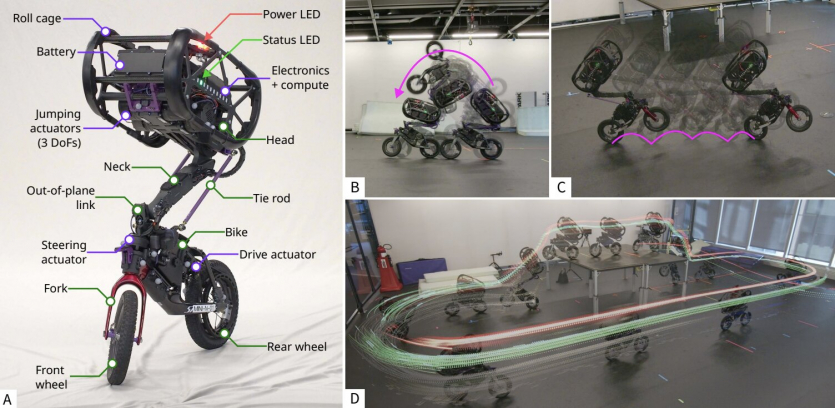
Инженеры применили компактный шарнирный механизм и современные алгоритмы машинного обучения, что позволило велороботу динамически изменять распределение веса, приседать, подпрыгивать или смещаться вбок для сохранения равновесия. Робот управляется с помощью всего лишь пяти степеней свободы, но это не мешает ему сохранять скорость и устойчивость на сложных участках маршрута.
Возможности применения и перспективы развития
Ключевой особенностью UMV является пространственно-механизированная система соединения между главным блоком и рулевой частью, в которой сосредоточена большая часть массы: аккумуляторы, вычислительные модули и исполнительные механизмы. Обучение робота происходило сначала в виртуальной симуляции, после чего отработанные навыки переносились на реальную платформу. Благодаря подходу обучения с подкреплением, UMV самостоятельно находит оптимальные способы выполнения маневров, в том числе таких, которые не были явно запрограммированы.
Это открывает перспективы для использования платформы в различных сферах — от городской доставки до междугородних перевозок по пересеченной местности и инспекции труднодоступных объектов, где обычный транспорт не может проехать. Команда RAI уже работает над совершенствованием UMV, стремясь сократить разрыв между моделированием и реальными испытаниями, чтобы устройство могло эффективно работать в динамичных и непредсказуемых условиях.