Інженери з Інституту робототехніки та штучного інтелекту (RAI) розробили інноваційного двоколісного велоробота Ultra Mobility Vehicle (UMV), який здатний виконувати складні маневри, балансувати, перестрибувати перешкоди та навіть рухатися на одному колесі. Створення цієї роботизованої платформи стало результатом натхнення трюками професійних велосипедистів-тріалістів і гірських велосипедистів, які щодня долають складні маршрути різними типами місцевості.
Про це розповідає ProIT
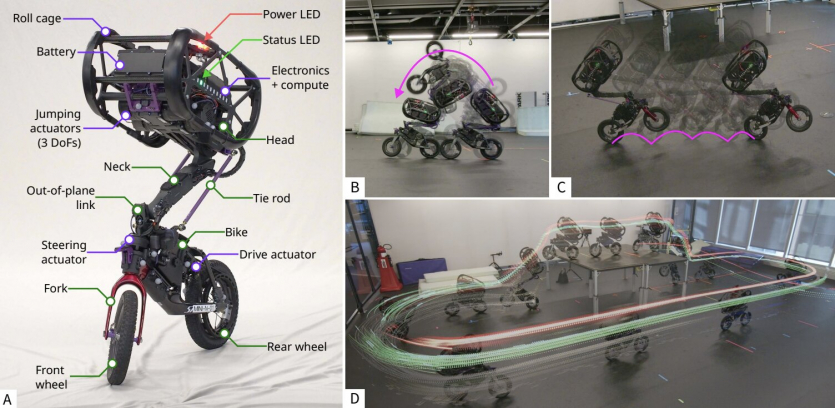
Унікальні технічні рішення та принципи роботи UMV
Велоробот UMV демонструє динамічну маневреність, яка не поступається навичкам досвідчених велосипедистів. За словами співавторів проєкту Бена Боксера та Сурьї Сінгха, головним викликом було знайти оптимальний баланс між швидкістю, ефективністю та здатністю долати складні ділянки місцевості. Робот отримав велосипедну раму, а його конструкція дозволяє змінювати положення маси, імітуючи рухи живого велосипедиста.
“Колеса забезпечують ефективність, а ноги допомагають долати сходи, бордюри та нерівну місцевість. У підсумку доводиться обирати між тим, наскільки складним, дорогим та енергомістким має бути робот, і тим, наскільки він здатний долати невідомі перешкоди під час руху. Ми постійно поверталися до того факту, що велосипедисти-тріалісти та гірські велосипедисти щодня долають цей розрив”, — зазначають розробники.
Інженери застосували компактний шарнірний механізм та сучасні алгоритми машинного навчання, що дозволило велороботу динамічно змінювати розподіл ваги, присідати, підстрибувати чи зміщуватися вбік для збереження рівноваги. Робот управляється за допомогою лише п’яти ступенів свободи, але це не заважає йому зберігати швидкість та стійкість на складних ділянках маршруту.
Можливості застосування та перспективи розвитку
Ключовою особливістю UMV є просторово-механізована система з’єднання між головним блоком та рульовою частиною, в якій зосереджено більшу частину маси: акумулятори, обчислювальні модулі та виконавчі механізми. Навчання робота відбувалося спочатку у віртуальній симуляції, після чого відпрацьовані навички переносились на реальну платформу. Завдяки підходу навчання з підкріпленням, UMV самостійно знаходить оптимальні способи виконання маневрів, зокрема таких, які не були явно запрограмовані.
Це відкриває перспективи для використання платформи в різних сферах — від міської доставки до міжміських перевезень по пересіченій місцевості та інспекції важкодоступних об’єктів, де звичайний транспорт не має змоги проїхати. Команда RAI вже працює над вдосконаленням UMV, прагнучи скоротити розрив між моделюванням і реальними випробуваннями, щоб пристрій міг ефективно працювати у динамічних і непередбачуваних умовах.