Італійські інженери вперше у світі успішно підняли в повітря людиноподібного робота, що стало значущою подією у розвитку аерокосмічної робототехніки. Гуманоїдний робот iRonCub MK3, створений на основі дослідницької платформи iCub, піднявся на висоту близько 50 сантиметрів завдяки чотирьом реактивним двигунам.
Про це розповідає ProIT
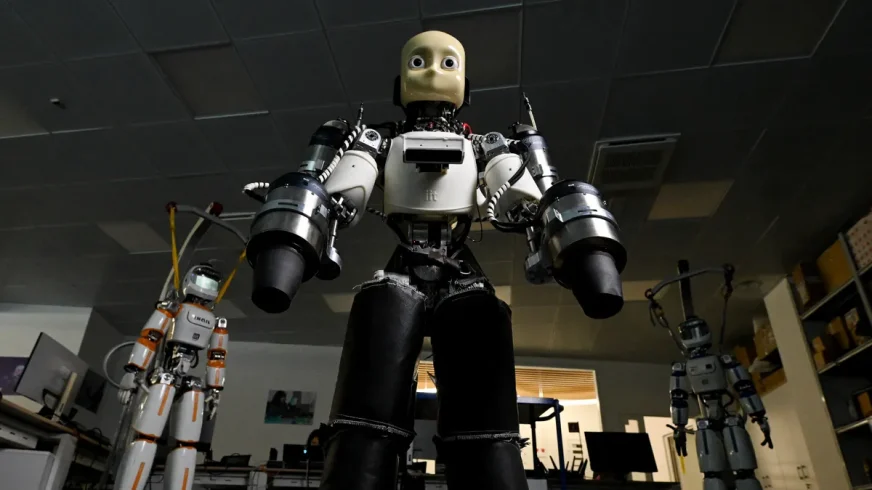
Особливості конструкції літаючого гуманоїда
Інженери для навчання робота польоту здійснили масштабну модернізацію його конструкції. Для цього на спині iRonCub встановлено два реактивні двигуни у вигляді ранця, а ще два — замість передпліч. Каркас робота посилили титановим хребтом, щоб витримувати навантаження під час польоту. Для захисту від високих температур вихлопу, що перевищують 600°C, використано спеціальні термостійкі панелі.
Під час демонстрації, яку провів Італійський інститут технологій, робот залишався на спеціальному підвісі для забезпечення безпеки. На оприлюдненому відео видно, як він поступово піднімається над поверхнею, активуючи всі чотири двигуни одночасно. Базою для розробки став iCub — гуманоїдний робот з характерною «дитячою» зовнішністю, широко використаний у дослідженнях штучного інтелекту.
Можливості та перспективи застосування
Літаючий гуманоїд відкриває нові горизонти для робототехніки, адже здатен виконувати завдання, недоступні наземним машинам. Такий робот стане у пригоді в пошуково-рятувальних операціях, зокрема для роботи у завалах або на підтоплених територіях. Він також може долати важкодоступні ділянки, допомагати знаходити постраждалих, розчищати уламки, а ще працювати у небезпечних умовах — наприклад, у зонах хімічних або радіаційних аварій, а також здійснювати ремонт під мостами чи у складних інфраструктурних об’єктах.
Найскладнішим для розробників стало створення унікальної системи керування, здатної координувати роботу двигунів та суглобів одночасно. Для цього команда сконструювала складний контролер, що постійно обчислює і коригує положення тіла робота та тягу кожного з двигунів для стабільного польоту. Перед першим реальним зльотом система пройшла багатоетапні випробування у комп’ютерних симуляціях.
“Цей успішний зліт є важливим доказом життєздатності концепції. Наступним кроком для команди розробників є вдосконалення системи керування, щоб робот міг протистояти зовнішнім факторам, таким як вітер”.
Розробники планують і надалі удосконалювати керування польотом, аби забезпечити стабільність роботи навіть у складних погодних умовах. Перший політ iRonCub MK3 вже наблизив майбутнє, яке донедавна здавалося лише фантастичним.