Ученые из Гарвардской школы инженерных и прикладных наук имени Джона А. Полсона сделали очередной прорыв в области робототехники, создав чрезвычайно реалистичные 3D-печатные мышцы для мягких роботов. Примененный ими метод позволяет программировать движения искусственных мышц непосредственно на уровне материала, приближая роботов к природной гибкости и адаптивности живых существ.
Об этом сообщает ProIT
Технологический прорыв в создании искусственных мышц
Исследователи отмечают, что главной сложностью в разработке новых роботов является имитация мышц, которые обеспечивают чрезвычайную вариативность движений в природе. Для создания максимально приближенных к биологическим мышцам команда использовала два вида эластомеров: активный жидкокристаллический эластомер, способный изменять форму под действием температуры, и пассивный эластомер, который сопротивляется деформации. Благодаря 3D-печати эти материалы размещаются рядом друг с другом через специальное сопло, которое вращается, позволяя точно контролировать дальнейшее поведение мышечных нитей.
“Наша система сочетает два типа мягких материалов: “активный” жидкокристаллический эластомер, который изменяет форму при нагревании, и пассивный эластомер, который сопротивляется деформации. Печатавая оба материала бок о бок через сопло, которое вращается, мы можем точно контролировать, как разные части нити будут вести себя впоследствии”, — говорится в исследовании.
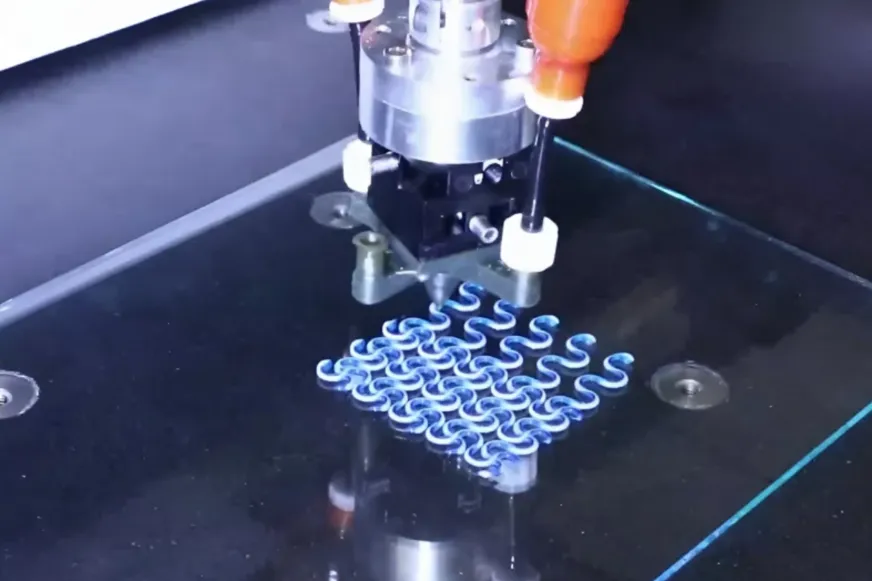
Когда активный материал нагревается, он сжимается вдоль определенного направления, а пассивный компонент противодействует этому, что заставляет нить сгибаться, скручиваться или даже закручиваться в спираль. В процессе печати вращение сопла формирует специфические спиральные структуры на молекулярном уровне, что открывает широкие возможности для программирования различных типов движений без традиционных жестких механизмов.
Потенциал и ограничения новой технологии
Ученые уже продемонстрировали применение этой технологии, напечатав мягкие решетки и волнообразные нити, которые существенно изменяют форму под действием тепла. Некоторые конструкции расширяются, а другие — сокращаются. В частности, удалось создать захваты, которые могут сжиматься вокруг предметов, поднимать их и затем отпускать, и даже плоские решетки, которые трансформируются в куполообразные структуры.
Однако технология пока что имеет ряд ограничений: для активации движения необходимо нагревание, поэтому скорость реакции и энергоэффективность еще требуют усовершенствования. Кроме того, эти искусственные мышцы пока не готовы к использованию в сложных промышленных приложениях с высоким нагрузкой.
В будущем разработка может дать толчок к появлению адаптивных мягких захватов, гибких биомедицинских устройств, роботов со сменной формой и других инновационных систем. Поскольку разработка основана на технологии 3D-печати, она открывает путь для создания уникальных архитектур, которые ранее было трудно реализовать традиционными методами.