Науковці з Гарвардської школи інженерних та прикладних наук імені Джона А. Полсона зробили черговий прорив у сфері робототехніки, створивши надзвичайно реалістичні 3D-друковані м’язи для м’яких роботів. Застосований ними метод дозволяє програмувати рухи штучних м’язів безпосередньо на рівні матеріалу, наближаючи роботів до природної гнучкості та адаптивності живих істот.
Про це розповідає ProIT
Технологічний прорив у створенні штучних м’язів
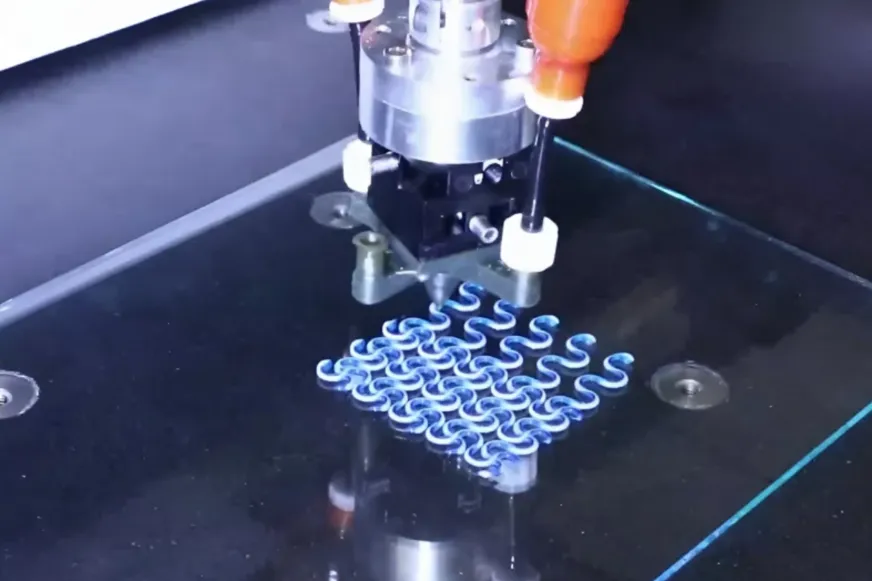
Дослідники відзначають, що головною складністю у розробці нових роботів є імітація м’язів, які забезпечують надзвичайну варіативність рухів у природі. Для створення максимально наближених до біологічних м’язів, команда використала два види еластомерів: активний рідкокристалічний еластомер, здатний змінювати форму під дією температури, та пасивний еластомер, який чинить опір деформації. Завдяки 3D-друку ці матеріали розміщуються поруч одне з одним через спеціальне сопло, що обертається, дозволяючи точно контролювати подальшу поведінку м’язових ниток.
“Наша система поєднує два типи м’яких матеріалів: “активний” рідкокристалічний еластомер, який змінює форму при нагріванні, і пасивний еластомер, який чинить опір деформації. Друкуючи обидва матеріали пліч-о-пліч через сопло, що обертається, ми можемо точно контролювати, як різні частини нитки поводитимуться згодом”, — йдеться у дослідженні.
Коли активний матеріал нагрівається, він стискається вздовж певного напрямку, а пасивний компонент протидіє цьому, що змушує нитку згинатися, скручуватися або навіть скручуватись у спіраль. В процесі друку обертання сопла формує специфічні спіральні структури на молекулярному рівні, що відкриває широкі можливості для програмування різних типів рухів без традиційних жорстких механізмів.
Потенціал та обмеження нової технології
Вчені вже продемонстрували застосування цієї технології, надрукувавши м’які решітки та хвилеподібні нитки, які суттєво змінюють форму під дією тепла. Деякі конструкції розширюються, а інші — скорочуються. Зокрема, вдалося створити захвати, що можуть стискатися навколо предметів, піднімати їх і згодом відпускати, і навіть плоскі решітки, які трансформуються у куполоподібні структури.
Однак технологія поки що має низку обмежень: для активації руху необхідне нагрівання, тому швидкість реакції та енергоефективність ще потребують вдосконалення. Крім того, ці штучні м’язи поки не готові до використання у складних промислових застосуваннях із високим навантаженням.
У майбутньому розробка може дати поштовх до появи адаптивних м’яких захватів, гнучких біомедичних пристроїв, роботів зі змінною формою та інших інноваційних систем. Оскільки розробка базується на технології 3D-друку, вона відкриває шлях для створення унікальних архітектур, які раніше було важко реалізувати традиційними методами.